
Helping a Robot Janitor
Does a user's perception of a service robot's level of autonomy encourage them to help it when it fails?
The Question
What kind of conditions promote ‘helping’ a robot in need and how does the perceived level of autonomy of a robot change this helping behavior? Do humans have the capacity to feel empathy towards a robot whose sole purpose is to help humans?
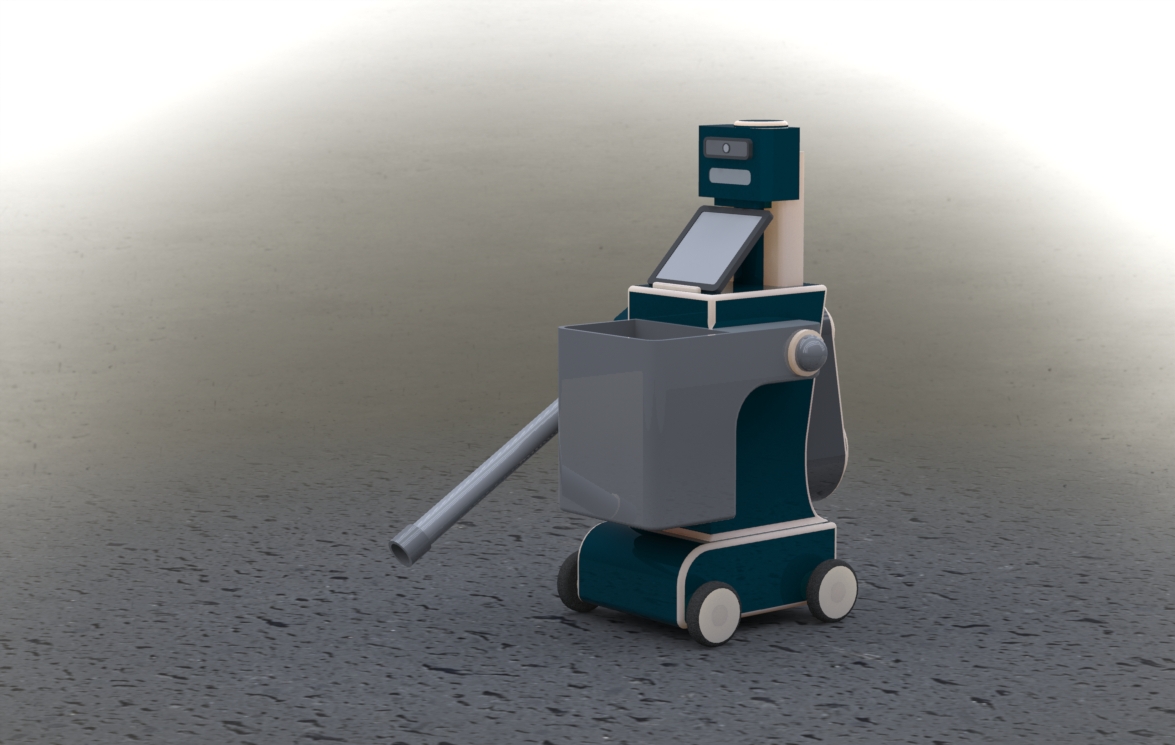
In order to investigate these questions, for our Human-Robot Interaction final project, we employed a service robot called Janitobot, a robot whose job was to clean the floors of Carnegie Mellon University. In our experiment, Janitobot makes verbal appeals for help to passer-bys. Across three different conditions in which Janitobot’s perceived level of autonomy was varied, we investigated how willing these passers-by were to help.
Literature Review
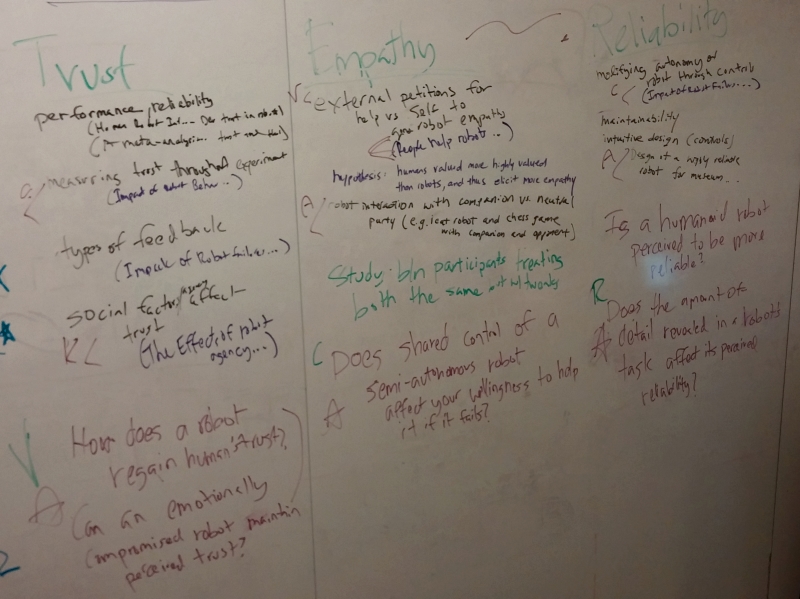
We grounded the experiment in prior research on trust, empathy, and perceived reliability in robotics. The central tension: humans are more willing to help other humans than machines, but robots that appear to have limited agency might trigger a different social response.
Robot & Interaction Design
We settled on a custodial robot to ground the experiment in a believable, everyday scenario. Janitobot’s job was to vacuum up a spill (M&Ms and Skittles) in its target area. It would fail mid-task and make a verbal appeal for help to whoever passed by.
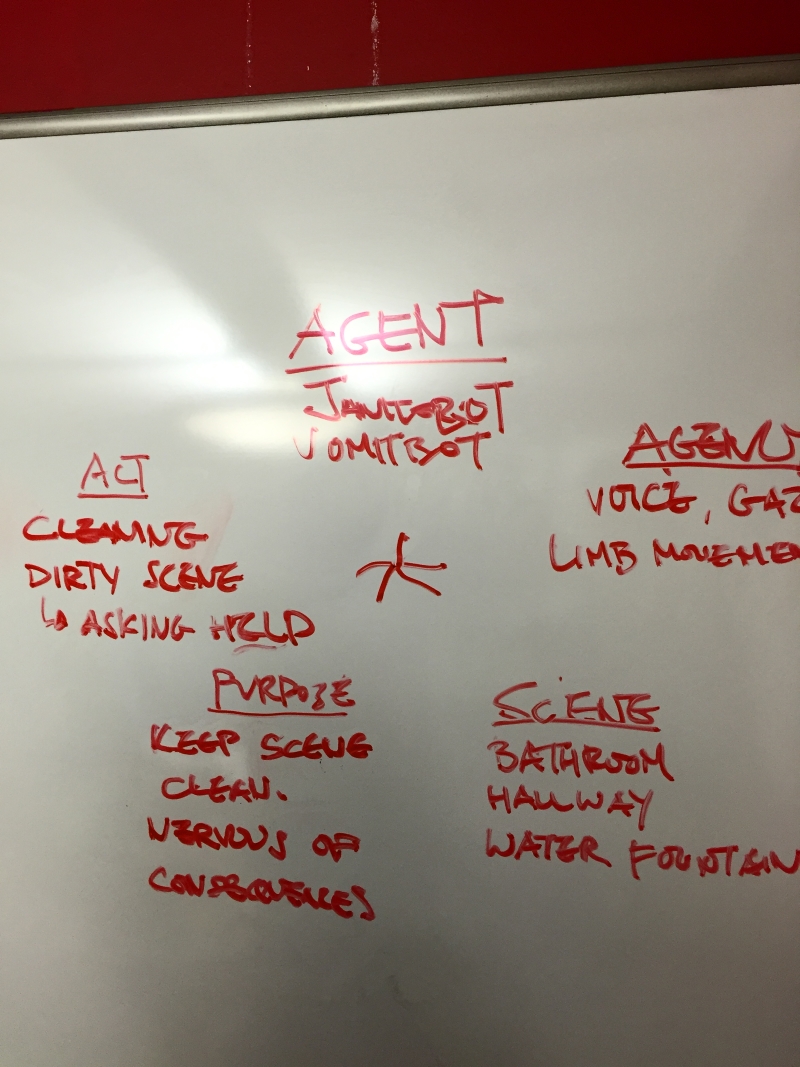
We used Burke’s Dramatic Pentad — a framework from rhetoric — to design the full staged interaction: who the robot was, what it was doing, where it was doing it, how it behaved, and why. This kept the encounter feeling real rather than theatrical.
Experiment: Three Conditions
We ran an uncontrolled field experiment in a low-traffic area of campus, varying Janitobot’s perceived level of autonomy across three conditions. The robot made the same verbal appeal in all three — we observed whether passers-by stopped and helped.
| Condition | Setup |
|---|---|
| Operator Present | Robot’s human controller clearly visible nearby |
| Semi-Autonomous | Controller perceived to be absent; robot appeared to act independently |
| Fully Autonomous | Robot appeared to act entirely on its own, no human involvement |


Findings
Participants were significantly more likely to help when the robot appeared to have a human operator involved — suggesting that perceived human accountability, not robot autonomy alone, drives helping behavior. The fully autonomous condition generated the least help.
Role
Interaction designer and experimenter. Responsible for the staged interaction design, experiment protocol, and field observation.