
Parallax AR System
AR guidance system for astronaut procedures aboard the International Space Station.
The Problem Space
Astronauts aboard the ISS regularly perform high-stakes maintenance, experimentation, and repair operations — often as novice users following dense paper procedures, in microgravity, with bulky gloves and no internet connection. A single misread step can cascade into hours of lost time or equipment failure.
Our team at Carnegie Mellon (Team Parallax) was assigned the NASA capstone: understand how procedure execution breaks down in constrained environments, then design a forward-facing system to improve it.
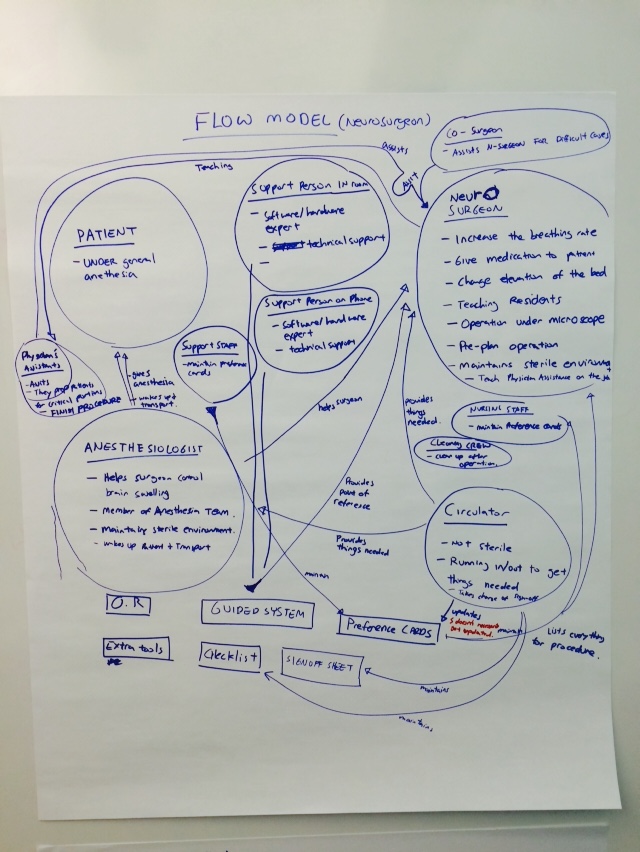
Research: Going to the Work
Rather than interviewing astronauts directly, we embedded ourselves in analogous high-stakes procedural environments where we could actually observe work in progress.

We conducted contextual inquiry across biotech manufacturing, construction (Habitat for Humanity), scuba diving, and a neurosurgery interview. Each setting exposed a different failure mode: misread steps, tool-finding interruptions, loss of place during distractions.
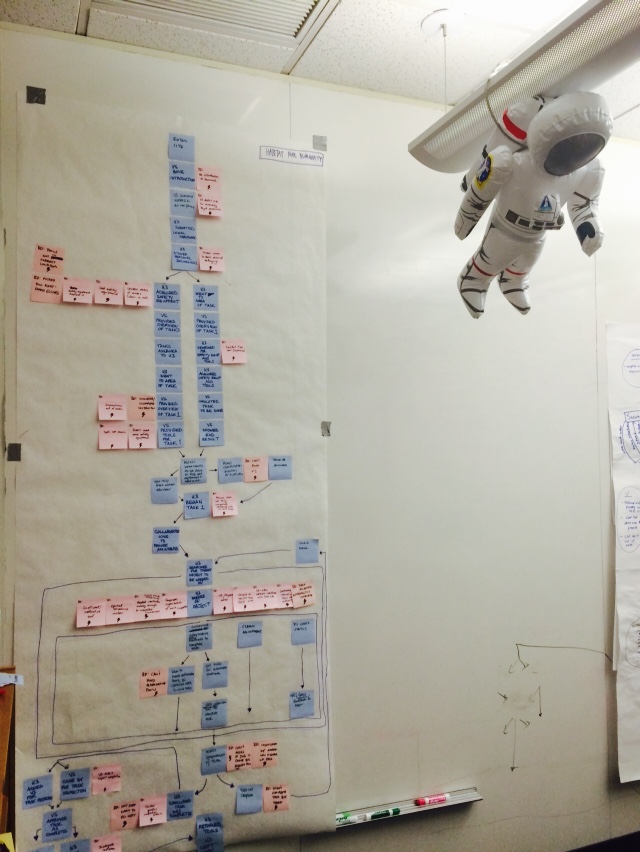
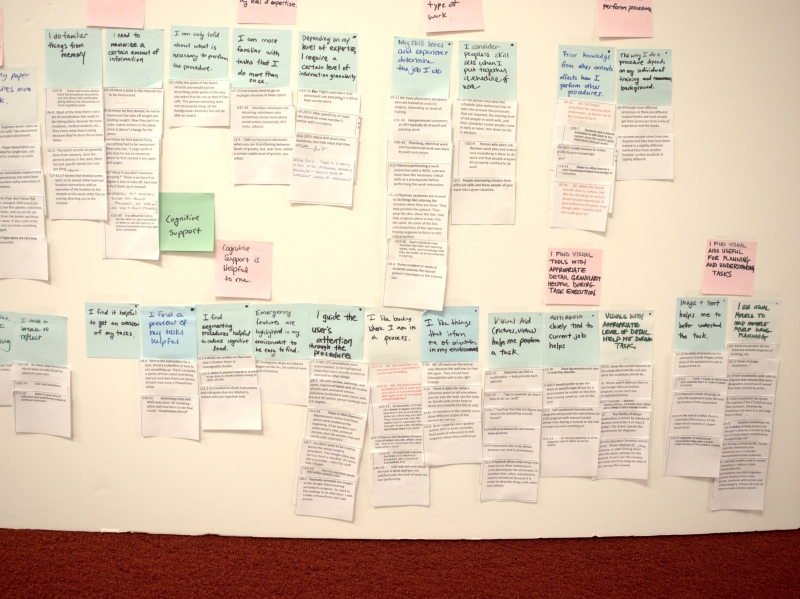
Synthesis: 1,000+ Notes
We synthesized our field research into an affinity diagram — over a thousand individual observations grouped by theme. The clusters pointed directly at the design opportunity: astronauts need a system that tracks their place in a procedure and directs them to required tools, without adding cognitive load.
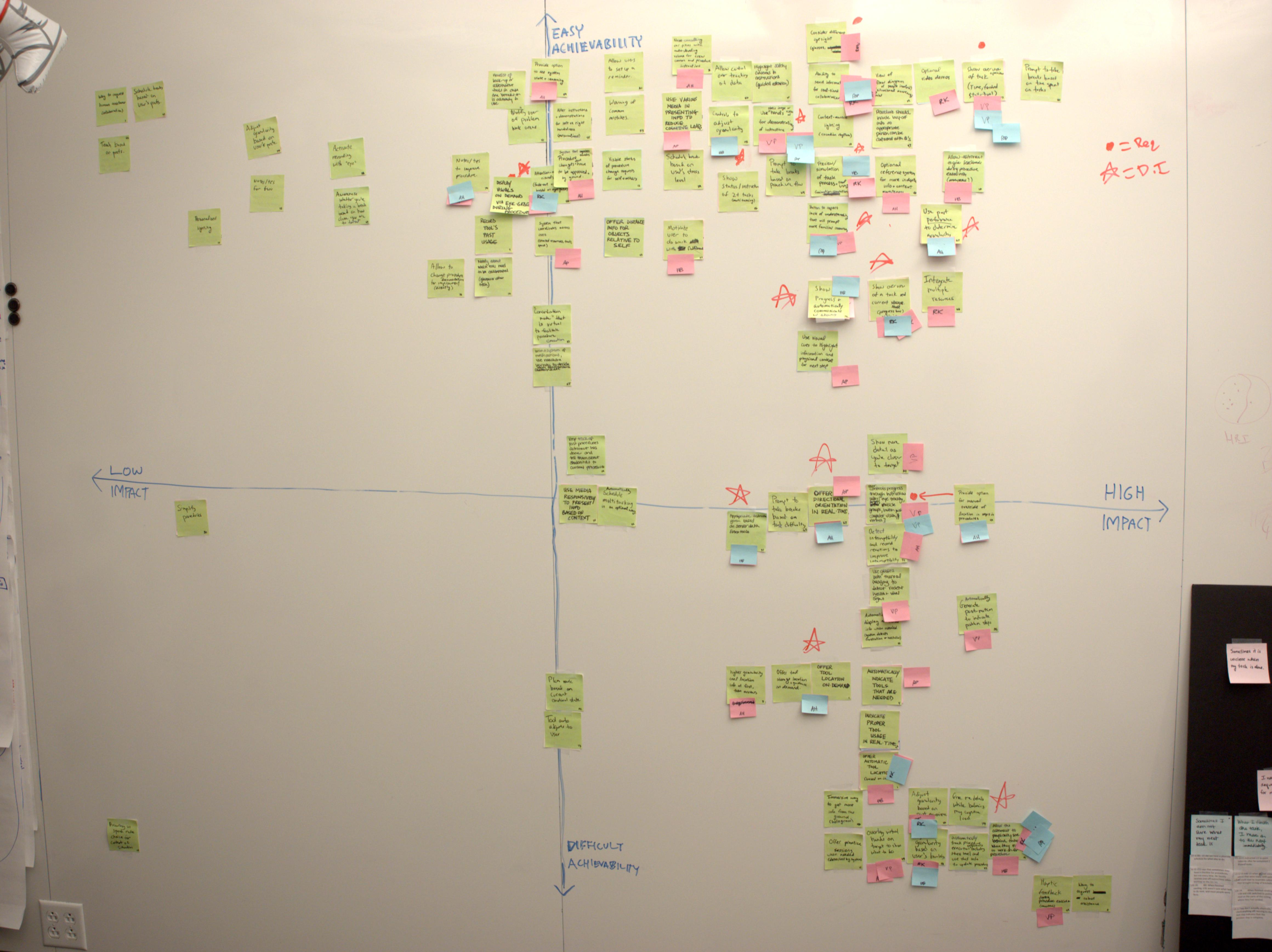
From the affinity work, we generated 150+ candidate design features and mapped them across an impact/feasibility matrix — focusing our prototype scope on what could be built in months and deliver the most mission value.
Prototyping: Low to High Fidelity
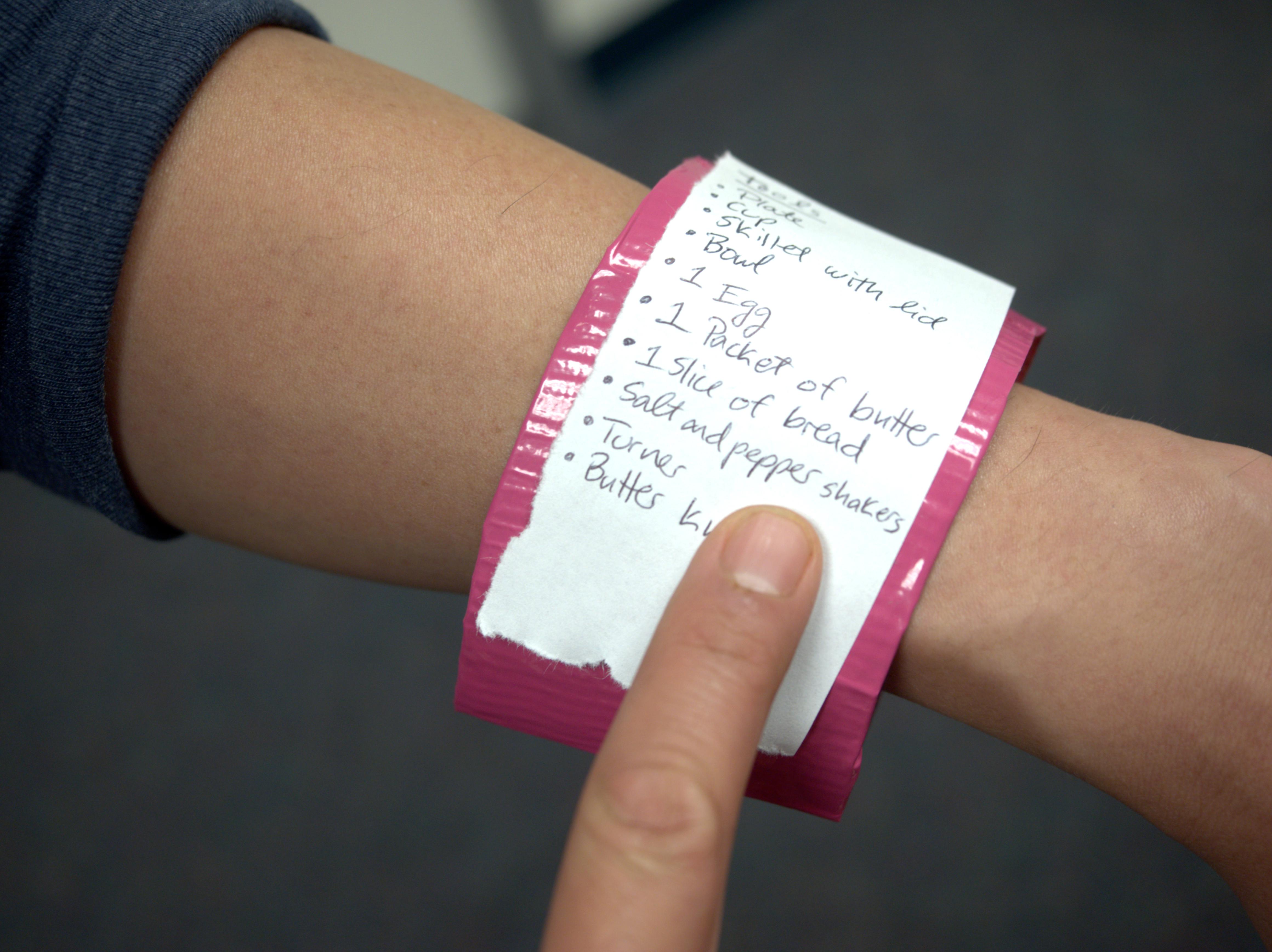
Early prototypes tested the core interaction concepts with everyday participants before any hardware was involved.
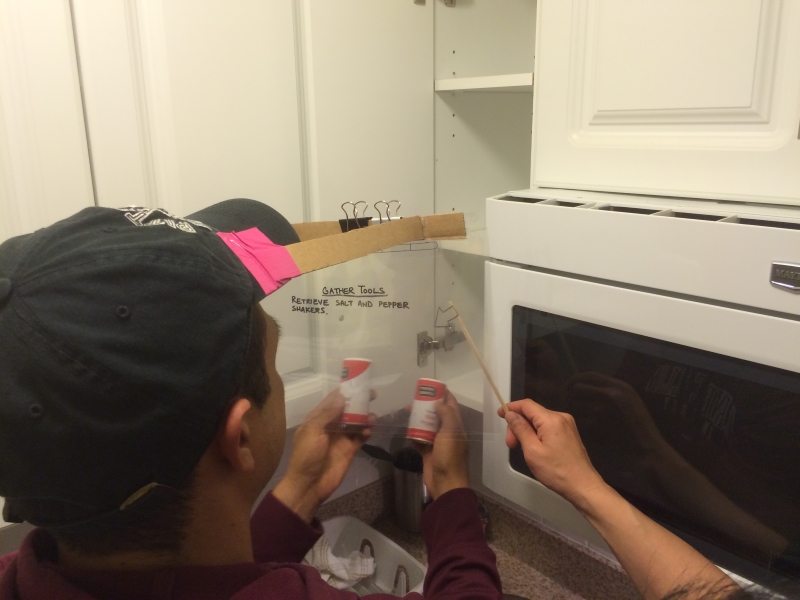
Medium-Fidelity Prototype
The mid-fi prototype put a functional heads-up display on a participant’s head for the first real usability tests. We adapted an ISS rodent habitat maintenance procedure and had participants work through it on a cardboard mockup of the habitat.

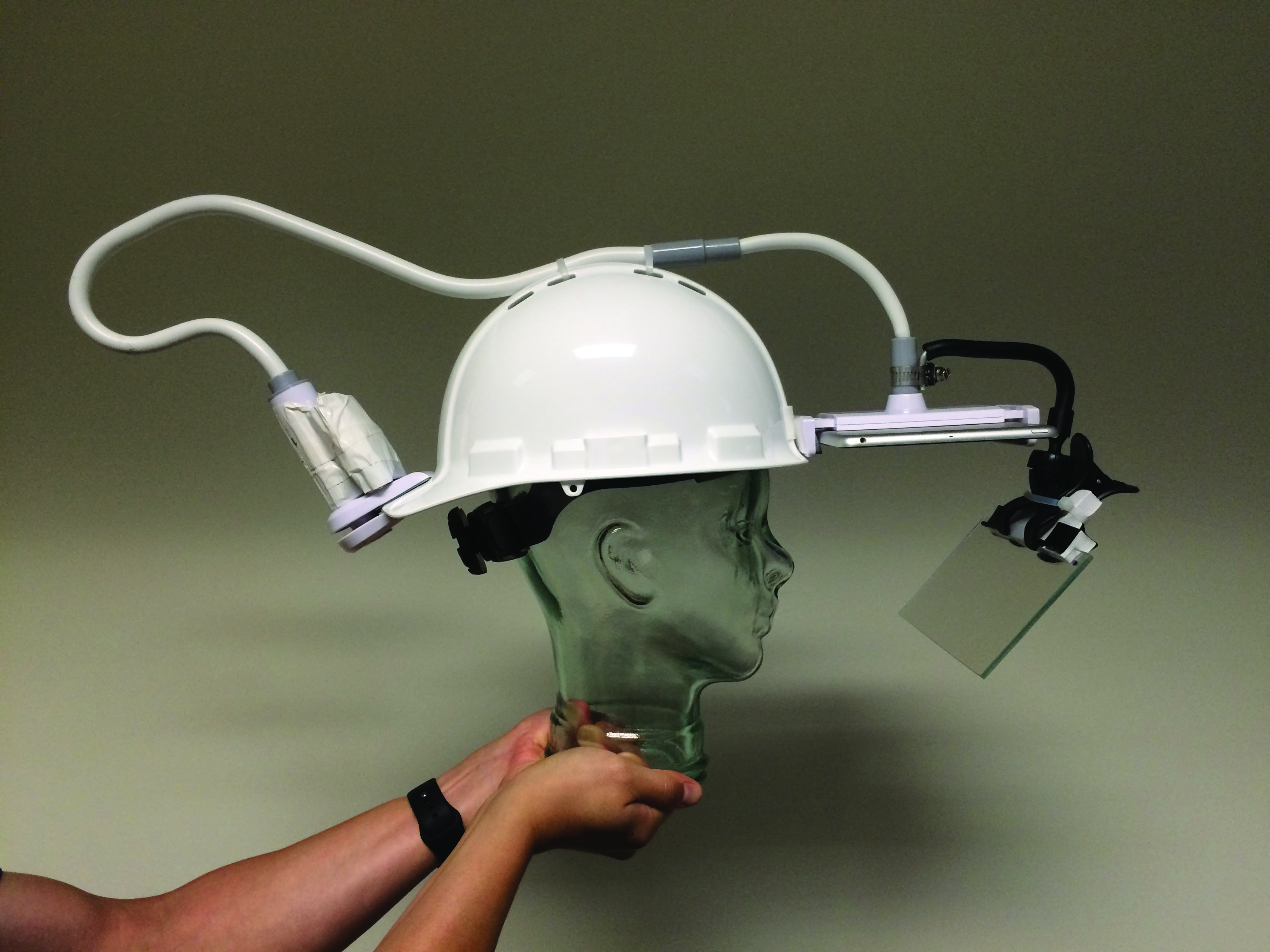
High-Fidelity Prototype
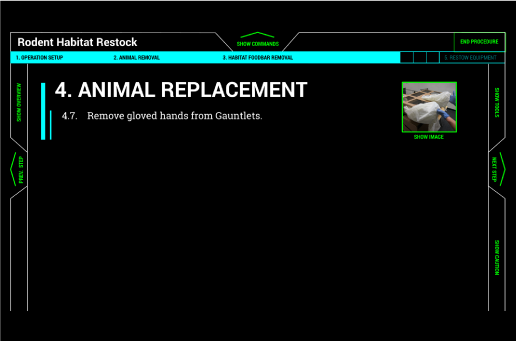
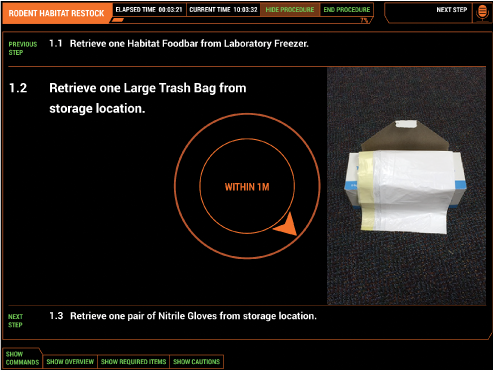
For the final prototype, we replaced the phone with teleprompter glass for true AR projection, added an iPad mini for a larger interface, and wired in speech recognition and Bluetooth beacon-based tool proximity detection.


Final Deliverable
Role
Led the project and owned most of the software stack — the AngularJS prototype interface, the Edison Python backend, and the Windows Phone speech module. Kept the team on scope through a semester-long NASA engagement.